
Projects
Visual SLAM
I implemented stereo SLAM (Simultaneous Localization and Mapping) C++ software capable of:
- Tracking the camera trajectory.
- Building a sparse map of the environment.
The software is inspired by the ORB-SLAM2 paper.
The computed trajectory is displayed in red, while the ground truth trajectory is shown in yellow.
The software operates on two separate threads:
- Trajectory computation: Continuously tracks the camera’s movement.
- Optimization: Minimizes the reprojection error to reduce cumulative errors.
Download the full report: Visual SLAM Report
Robotic Arm Teleoperation Using a Skin Sensor
I developed ROS-based software to teleoperate two HEBI robotic arms using skin sensors designed to detect human touch.
Key features:
- An LSTM Neural Network processes sensor data to classify various types of human touch.
- The classification results are combined with an inverse kinematics algorithm to compute precise low-level joint commands, enabling smooth and responsive arm movements.
Connect 4 Robotic Player
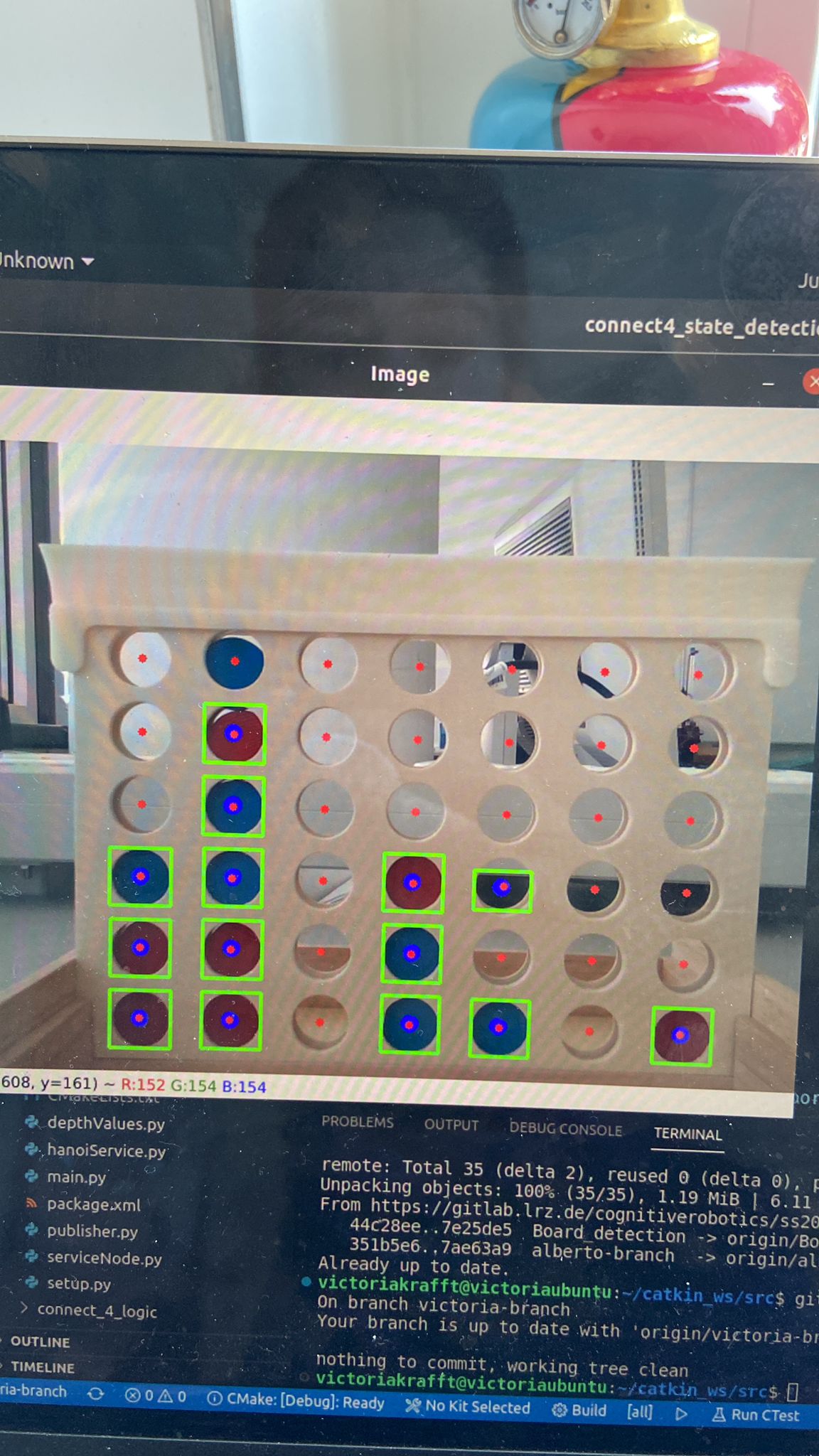
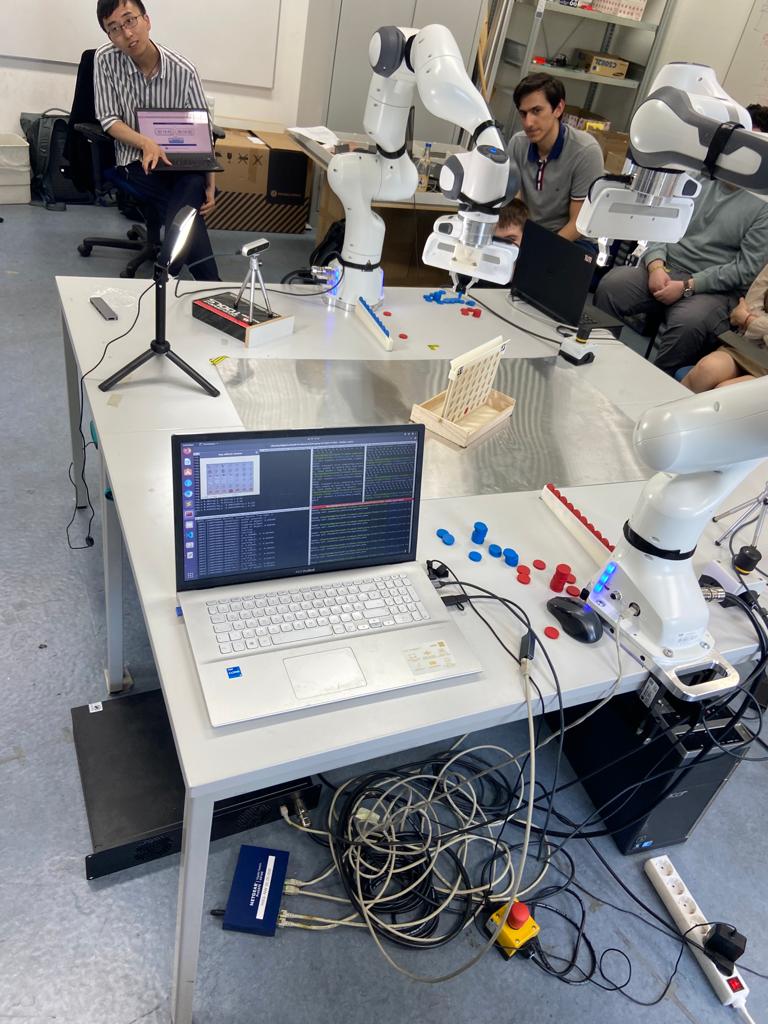
I collaborated with a team to program a Franka Emika robotic arm to play Connect 4.
The robot uses an RGB-D camera to estimate the current state of the game board. This information is processed by a machine learning algorithm inspired by AlphaZero to plan the next move.
For our project we competed in a challenge, where we showcased the system’s capabilities and achieved first place.
Drone Controller using Reinforcement Learning
I collaborated with a team of four to develop a robust software stack for an autonomous drone using ROS2. My primary focus was on the control system that was implemented using Reinforcement Learning, specifically using Proximal Policy Optimization (PPO) algorithm. Download the full report: Drone Report